

7-in-7 | Day 5
26 Oct, 2019Problem
A blind person knows any obstructing objects in front of him/her but does not know where to go. Either a helper always goes along with him/her or ask for directions all along the way.
Idea
The idea is to embed 8 haptic feedback motors (or LRAs) sandwiched alongside the belt in all 8 directions on a compass along with a driving system which will be inside the belt’s buckle.
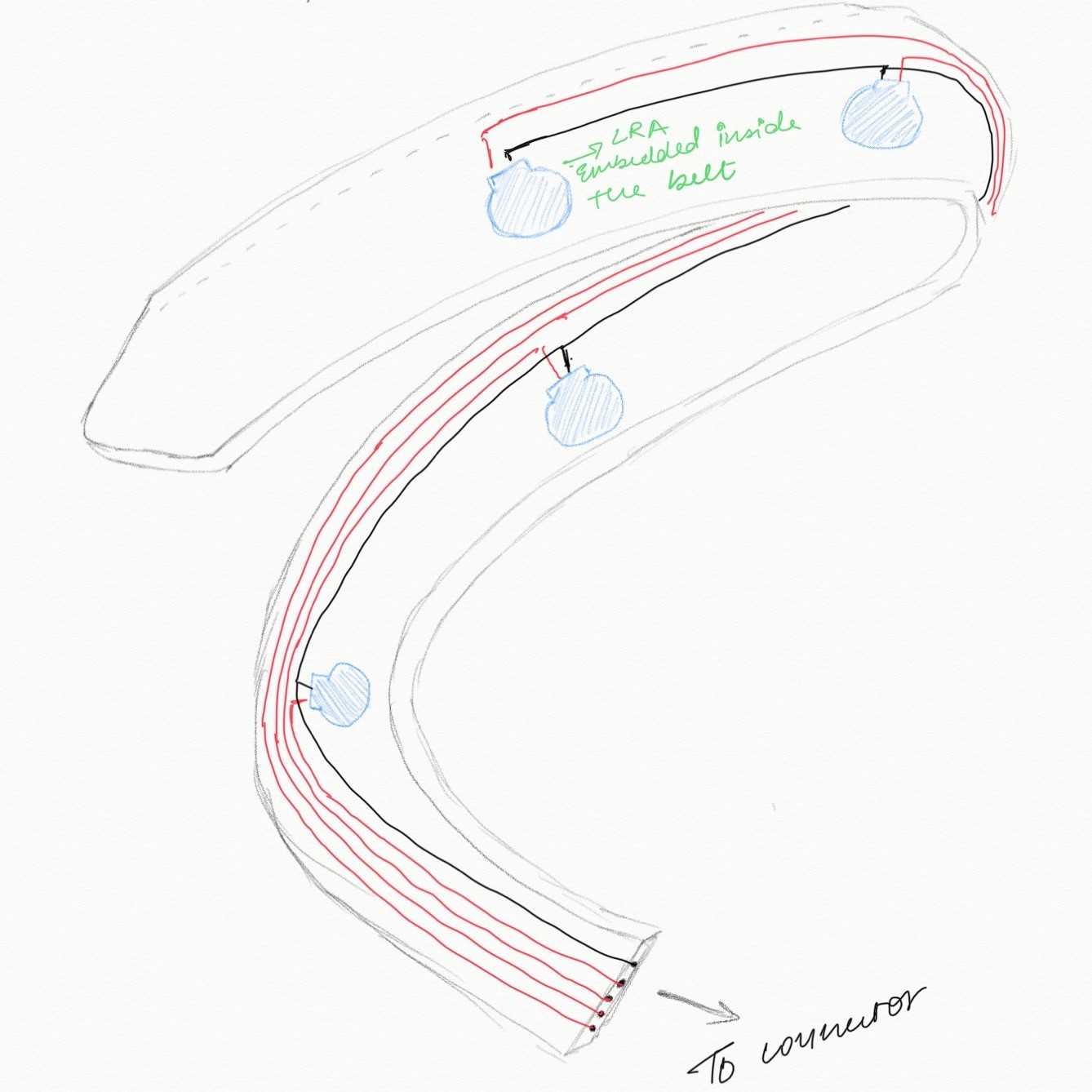
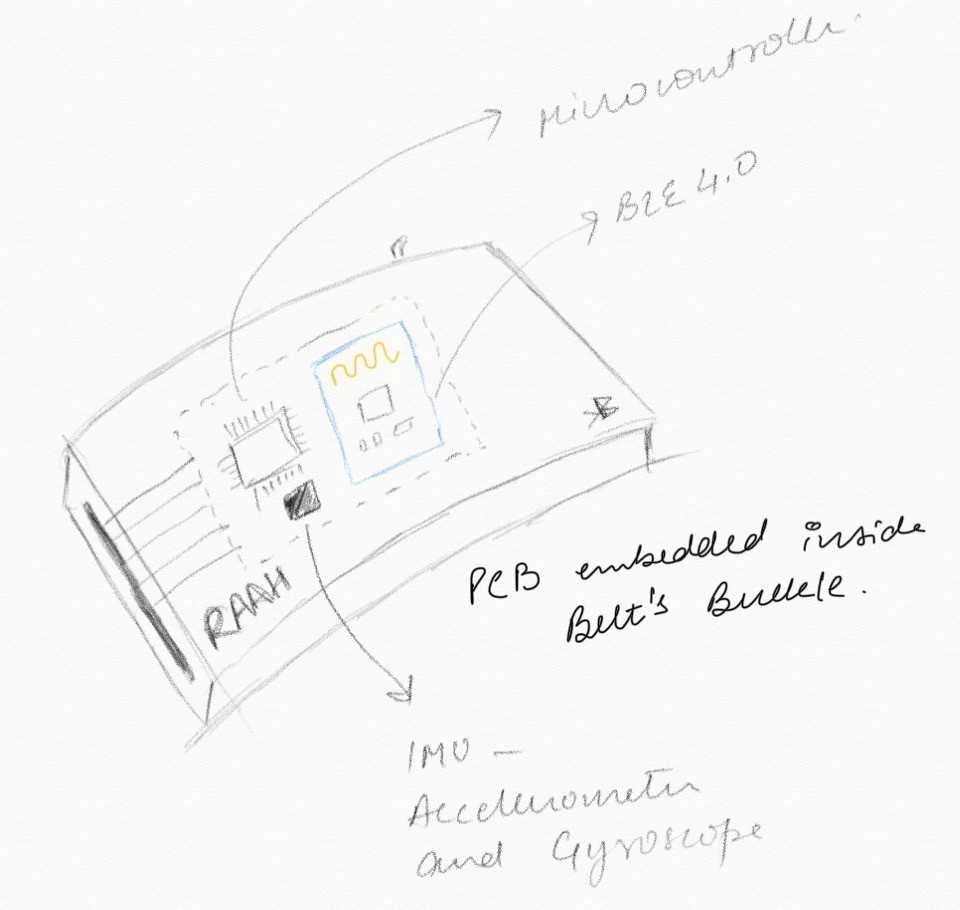
The above illustration shows belt fitted with Haptic Motors (or LRAs). This driving system will be a custom designed PCB with following components on it -
- 9 DOF IMU – this will consist of a 3-axis accelerometer, gyroscope and a magnetometer.
- Low Energy Bluetooth 4.0 – this will be used to connect to phone that has bluetooth and internet connectivity.
- A micro-controller for interfacing the IMUs and Bluetooth – ATMega328 is a preferred choice.
- Battery – Minimum requirements are 3.7V with a capacity of 1000mAh
- LiPo Charger – A charger on board for charging up the battery.
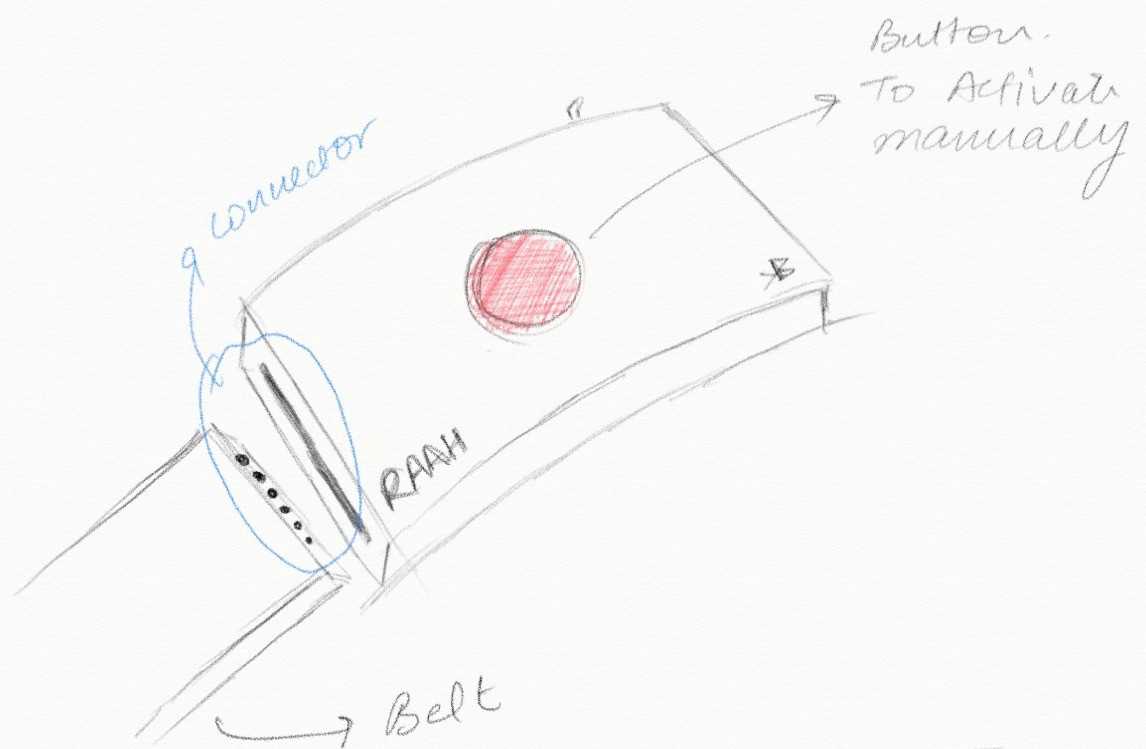
The buckle will have magnets in design so that it makes it easy for the differently-abled people to charge the battery and a button on top of buckle to start or stop navigation.
There is an Android and iOS compatible application that will help the differently-abled to navigate by communicating with device. The app will send the heading direction and corresponding feedback motor will turn on signalling to the user about direction in which he/she needs to turn.
Communication Flow
- When the button is pressed it notifies app to start the listen mode where the user says the location he wants to travel to.
- Once the location is said user’s location is calculated and data is fetched from Google’s Directions API.
- This returned data is processed step by step along with user’s location and user’s heading direction which is calculated by the IMU in user’s buckle.
- A single signal is sent from app to the buckle when user needs to change his/her heading direction. This signal is processed by the buckle’s micro-controller which turns on specific haptic motor, notifying user about direction change.
- When user reaches his/her direction all motors vibrate for a split second notifying arrival.
- User can press the button twice on his/her belt to stop the navigation.


